
Курс молодого 3D друкаря, Тести, порівняння та огляди
Кінематика 3D-принтера. На чому визначитися під час вибору 3D принтера?
21
Бер
Бер
Кінематика 3D-принтера. На чому визначитися під час вибору 3D принтера?
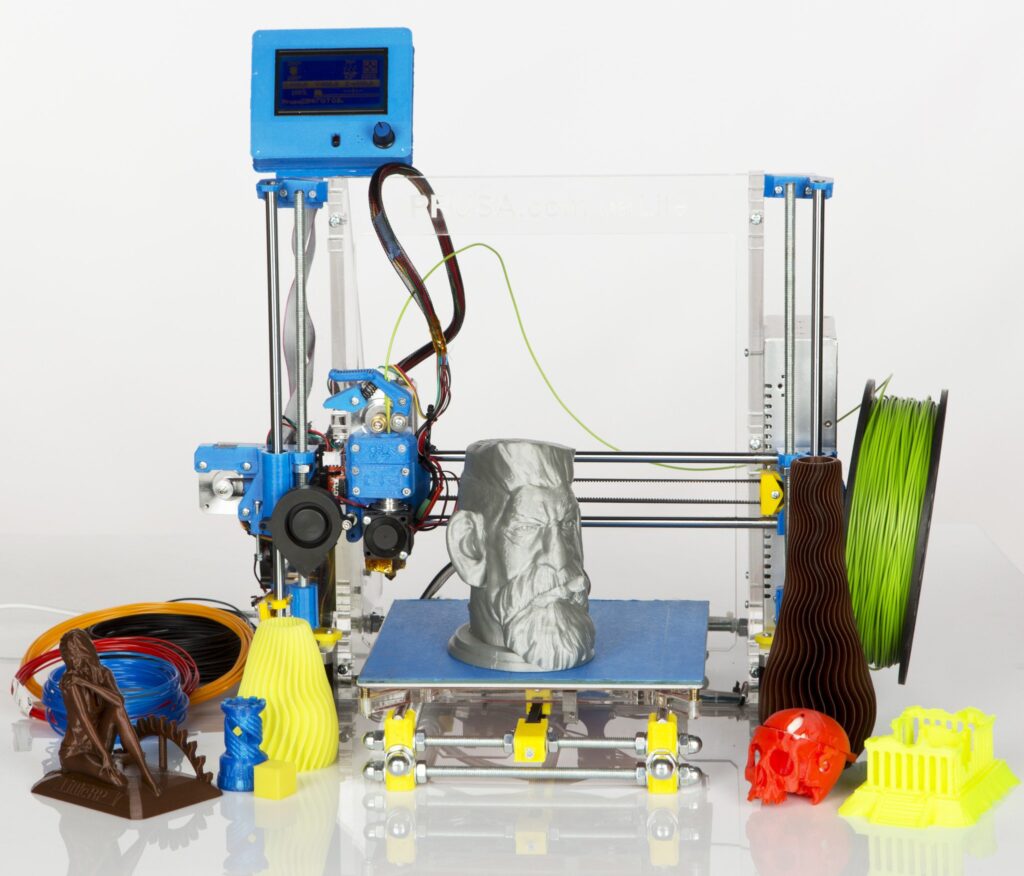
Всім відомо, що найпоширенішою є кінематика 3D принтера Prusa Mendel :
Принтер побудований таким чином, що екструдер рухається по осі Х (вправо-вліво) і осі Z (вгору-вниз). Стіл рухається по осі Y (вперед і назад) – або XZ Head Y Bed . Все досить просто. Однак конструкція має дуже велику кількість кріплень, гайок, гвинтиків, які дуже важливо одночасно тримати налаштованими на правильну геометрію. У випадку, якщо Ви не використавши різні фіксатори різьблення та ідеально налаштували Ваш принтер – в основі Ви отримаєте якісний друк, який чим вище, тим більше почне “спливати”. Танці з бубном у процесі калібрування та налаштування принтера не на довго ефективні =)
Точність у подібних 3D принтерах залежить від різьбових шпильок та їх жорсткості. Якісні шпильки – це 70% якості цього 3D принтера.
Якщо ж зробити заміну кволих шпильок на більш міцні, цілісні елементи, то результат якості друку буде значно вищим.
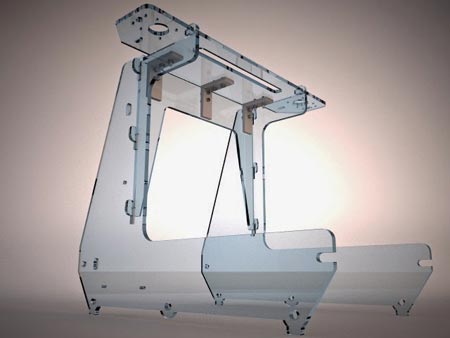
Ця модель в еволюції Prusa зветься Prusa Air. Потім ще з’явилася Prusa i3 і ще безліч варіантів. Ті самі колишні шпильки в різних варіантах. Наприклад такий:
Зібрати і що ще важливіше – налаштувати такий принтер в рази простіше. І якість друку буде гарантована на рівні промислових зразків, головне не перегинати зі швидкістю друку. такі 3D принтери не обов’язково повинні бути з акрилу, багато хто з легкістю використовують фанеру або МДФ:
Тут найважливіше – це будь-яким способом досягти паралельності (перпендикулярності) осей.
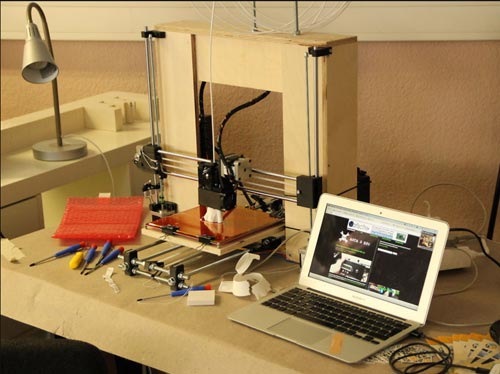
Наступний варіант кінематики, це 3D принтери, у яких стіл рухається не лише по одній осі.
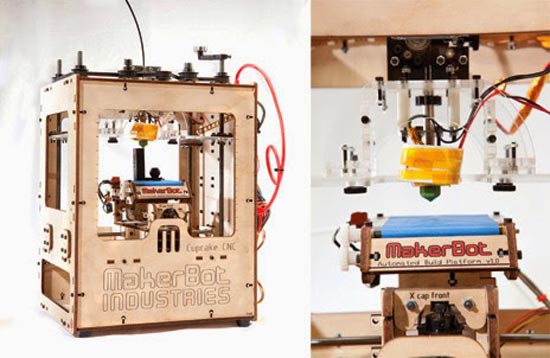
На фото одна з перших моделей компанії Makerbot. У цьому 3D принтері стіл рухається осі X і Y, а екструдер тільки осі Z.
Таку кінематику часто використовують у різних мікрофрезерних верстатах, адже значно простіше де набагато легше рухати маленьку заготівлю (об’єкт друку), ніж важкий інструмент (екструдер).

Далі Дельта, родоначальником якої є Rostock
Delta – роботи з абсолютно неземною кінематикою! 3D принтер Delta – де стіл стоїть міцно зафіксований, а екструдер літає по всіх трьох осях – мабуть, чи не єдина кінематика, має повноправну назву 3Д. Процес друку просто заворожує.
Пріоритет у таких принтерах – це ультрашвидкість! Головне, щоб потужності двигунів вистачило:)
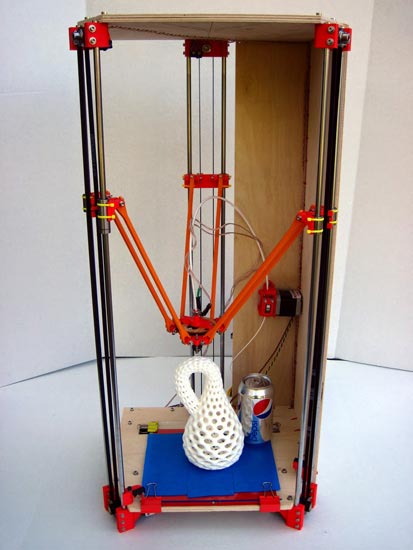
Але є й мінус. Для руху по будь-якій осі – в дії повинні прийти всі три двигуни одночасно. У цьому випадку висока ймовірність накопичення сумарної помилки в точності позиціонування, яка, крім усіх нюансів, дуже залежить від наявності люфтів у шарнірах плечей.
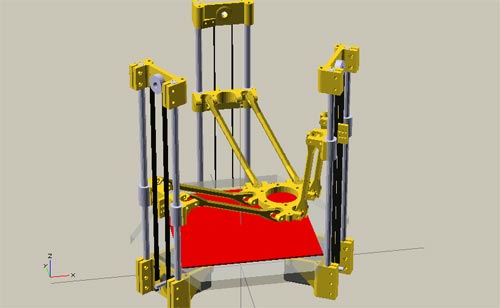
Щоб позбутися вищезгаданих люфтів зазвичай використовують кульові наконечники, наприклад:

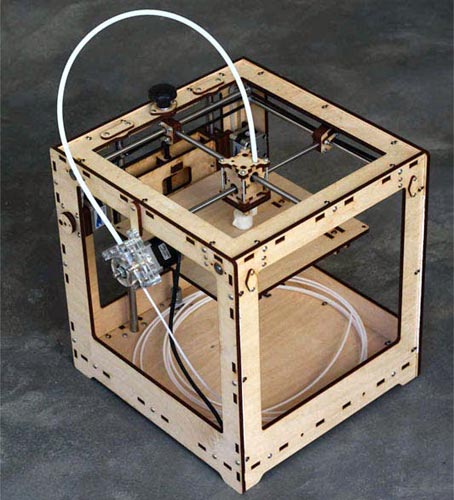
на сьогодні найпопулярнішою і найпопулярнішою виробниками 3D принтерів, є кінематика XY Head Z Bed . Коли екструдер рухається по осях XY, а стіл – по Z. Ну і звичайно, найвідоміша модель, яка реалізувала цю кінематику – це всім відомий Makerbot Replicator, всі його версії за винятком 5-ї генерації:

За допомогою двох зубчастих ременів двигун осі Y переміщає каретку осі X, на якій закріплений двигун, який приводить в дію друкувальну головку. Все як добре, але при цьому завжди потрібно “катати” туди-сюди двигун осі Х, а це зайва вага …. Та й треба завжди стежити за якістю натягу ременів. Усі три окремі ремені обов’язково мають бути натягнуті струною. Інакше якісного друку Вам не видно.
У кінематиці 3D принтера Ultimaker двигуни осей XY стоять нерухомо:
За допомогою чотирьох великих і двох маленьких ременів і гладких загартованих валів починає рухатися друкуюча голова з дуже гідною швидкістю. Як результат – якість друку у 3D принтерів з таким чином побудованою кінематикою, одна з найкращих. Детальніше кінематична частина 3D принтера :
У цій конструкції особисто мені не подобається використання валів, що обертаються, які зобов’язують використовувати бронзові (або фторопластові) втулки замість підшипників кочення. Та й вали повинні бути ідеально рівними, інакше весь механізм штормитиме під час руху. Велика кількість зубчастих ременів я б теж не відніс до плюсів конструкції, тому шукаємо далі.
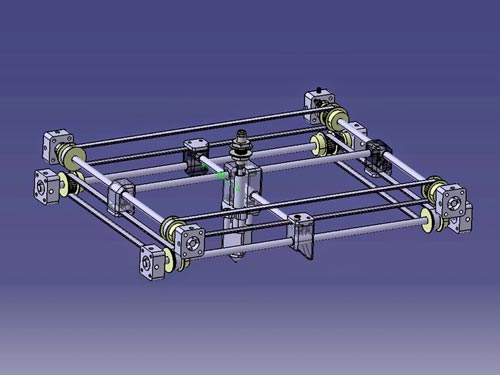
Є дуже проста, але геніальна кінематика 3D принтера – це H-Bo t. Конструкція передбачає всього один довгий ремінь і не потребує рухомих моторів. При кінематиці H-bot краще використовувати армований ремінь – ніяких проблем з натягувачами. Головне – жорсткість конструкції! Інакше друкуватимете не куги, а овали.
Основна проблема H-bot криється в тому, що кран балка приводиться в рух одним ременем, при цьому зусилля прикладається лише до одного з кінців кран балки, що призводить до посиленого зношування у жорстких конструкцій і перекосом балки при недостатньо жорсткому конструктиві кінематики.
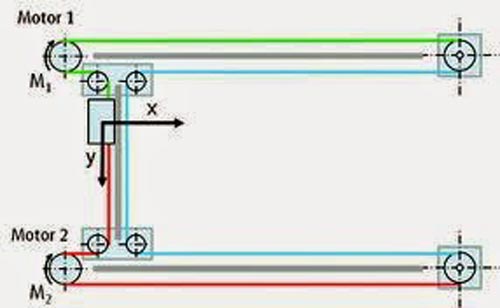

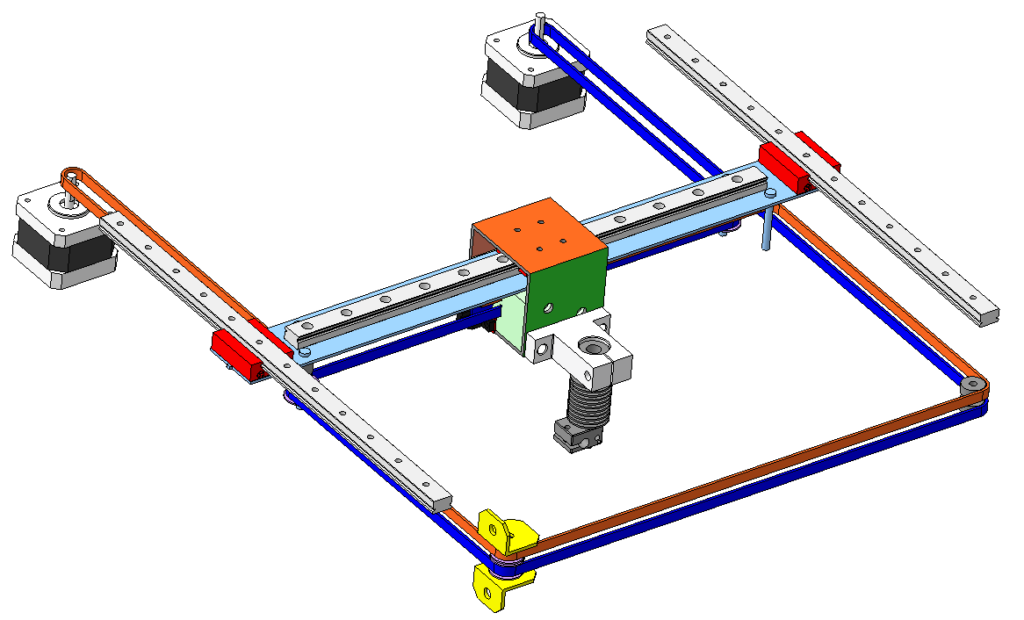
Багато хто плутає кінематику H-Bot з кінематикою CoreXY


І CoreXY та H-Bot дійсно дуже схожі. В роботі.
При обертанні обох двигунів в один і той же бік, виконується рух екструдера по осі X. Під час обертання обох двигунів у протилежний бік – рухається каретка з екструдером по осі Y. У разі, якщо буде обертатися лише один з двигунів – отримаємо одночасний рух по двом осям, тобто це буде рух по діагоналі.


Зазначимо, що прошивка Marlin чудово підтримує кінематику CoreXY. Потрібно розкоментувати в конфігурації всього один рядок.
//Невідповідь про те, що натискати на лінію CoreXY kinematics
// #define COREXY
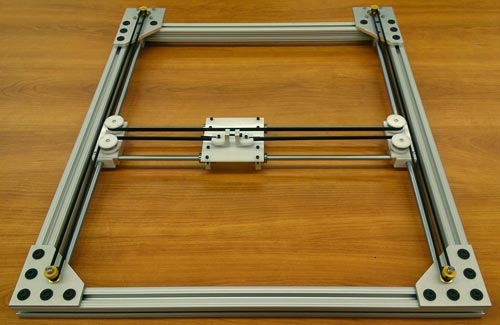
Не озброєним оком помітні плюси кінематики CoreXY – двигуни перебувають у стаціонарному положенні, їм не треба нікуди їздити, відповідно, вони можуть бути будь-якими потужністю (і відповідно вагою). Два зубчасті ремені коротші ніж один довгий у H-bot і як наслідок менш схильні до розтягування.
Інженери найгучнішої компанії-виробника 3Д принтерів Makerbot у п’ятому генерації 3Д принтерів вирішили використовувати саме кінематику H-bot:

Наша команда інженерів так само прийняла рішення використовувати в розробках тільки найкраще! Тому наші моделі мають кінематику CoreXY в 3D принтері Prime
