
Драйвер шагового двигателя А4988 для 3д принтера
55.00 ₴
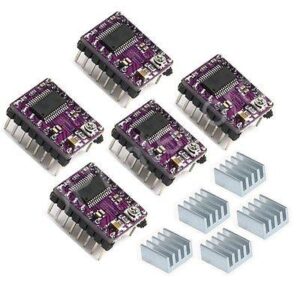
Комплект поставки: драйвер + радиатор
Нет в наличии
Драйвер шагового двигателя А4988 для 3д принтера
Драйвер создан на основе микросхемы управления шаговым двигателем компании Allegro A4988, изготовленной по ДМОП-технологии с регулятором и защитой по току, поэтому мы настоятельно рекомендуем ознакомиться с спецификацией A4988 перед использованием этого продукта (1 МБ pdf). Этот драйвер позволит управлять биполярным шаговым двигателем с выходным током до 2 А на обмотку (для получения дополнительной информации смотрите раздел о рассеивании мощности). Ниже приведены ключевые особенности драйвера:
- Простой интерфейс управления шагом и направлением вращения электродвигателя.
- Пять различных разрешений движения: полный шаг, 1/2-шага, 1/4-шага, 1/8-шага, 1/16-шага.
- Регулируемый контроль тока с помощью потенциометра позволит установить максимальный выходной ток. Это даст вам возможность использовать напряжение выше допустимого диапазона для достижения более высокой угловой скорости шага двигателя.
- Интеллектуальное управление автоматически выбирает режим регулирования затухания тока (медленный и быстрый режимы).
- Защитное отключение при перегреве и перегрузке по току, а также блокирование питания при снижении напряжения.
- Защита от короткого замыкания на землю, защита от замыкания в нагрузке.
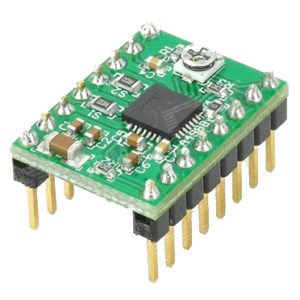
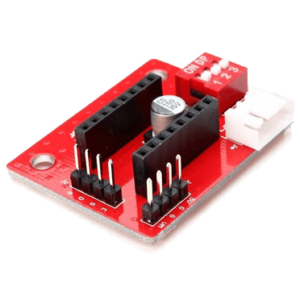
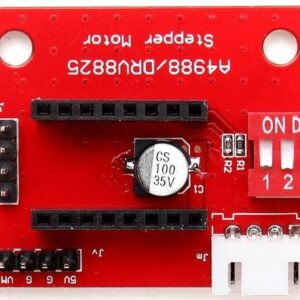
- Этот продукт поставляется со всеми компонентами поверхностного монтажа, включая микросхему драйвера A4988, установленных как показано на изображении.
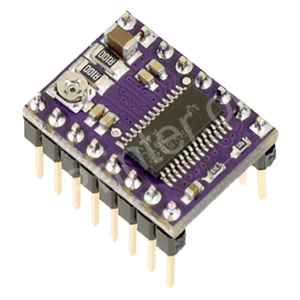
компания Pololu производит несколько драйверов шаговых двигателей, которые могут использоваться как альтернатива данному модулю. Например, в драйвере Pololu A4988 Black Edition производительность на 20% выше, и за исключением тепловых характеристик, Black Edition и данная (зеленая) плата являются взаимозаменяемыми. Также есть большая версия драйвера Pololu на A4988, которая имеет защиту от обратного питания на главном входе питания, а также встроенными 5 В и 3,3 В стабилизаторами напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы Pololu на DRV8825 предлагают на около 50% выше производительности в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2,5 В; любую из этих плат можно использовать в качестве альтернативы данному драйверу во многих приложениях.
Также отмечается, что некоторые однополярные шаговые двигатели (например, с шестью или восьмью выводами) можно управлять с помощью этого драйвера как биполярных. Драйвер не может использоваться для управления униполярными двигателями с пятью выводами.
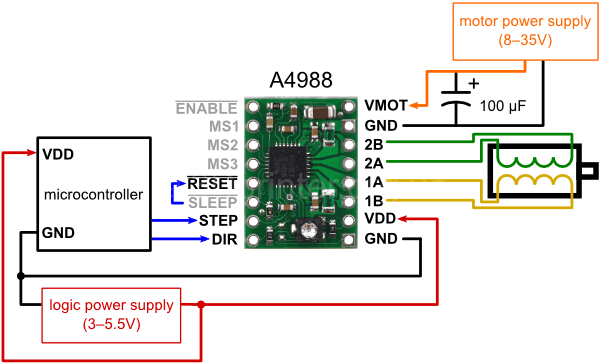
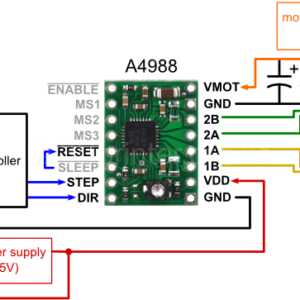
Для использования драйвера необходимо подать питание на выводы VDD и GND для логического уровня (3-5,5 В) и на выводы VMOT и GND для питания двигателя (8-35 В). Для обеспечения необходимого тока (до 4 А в пиковых значениях) необходимо установить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: на плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает ее уязвимой для индуктивно-емкостных скачков напряжения, особенно если питать провода длиннее нескольких сантиметров. В некоторых случаях, даже при напряжении питания двигателя всего 12 В, эти перегрузки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Один из способов защиты платы от подобных скачков – установка большого (не менее 47 мкФ) электролитического конденсатора между выходом питания (VMOT) и землей близко к плате.
- Подключение двигателя:
При правильном подключении, через Pololu A4988 можно управлять четырех-, шести- и восьми-проводными шаговыми двигателями.
Внимание: Подключение или отключение шагового двигателя при включенном драйвере может привести к поломке двигателя.
Размер шага (и микрошага):
Обычно шаговые двигатели имеют определенный размер шага (например, 1,8 ° или 200 шагов на оборот), при котором достигается полный оборот на 360 °. Шаговый драйвер с микрошагом, такой как A4988, позволяет увеличить разрешение за счет возможности управления промежуточными шагами. Это достигается путем нарушения обмоток среднего тока. Например, управление мотором в режиме четверти шага даст двигателю с размером 200 шагов через оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задается комбинациями переключателей на входах (MS1, MS2 и MS3). С их помощью можно выбрать пять разных шагов, соответствующих таблице ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающих к земле резисторов, а на MS2 – 50 кОм, и если оставить их не подключенными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями тока. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
| MS1 | MS2 | MS3 | разрешение микрошага |
|---|---|---|---|
| низкий | низкий | низкий | полный шаг |
| высокий | низкий | низкий | 1/2 шага |
| низкий | высокий | низкий | 1/4 шага |
| высокий | высокий | низкий | 1/8 шага |
| высокий | высокий | высокий | 1/16 шага |
–Входы управления:
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR НЕ подтянуты к какому-либо конкретному внутреннему напряжению, поэтому при создании приложений необходимо подключить их к определенному уровню напряжения. Если вам нужно просто вращать двигатель в одном направлении, вы можете соединить вывод DIR напрямую с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Дополнительные сведения об этих состояниях смотрите в техническом описании. Обратите внимание, что вывод RST не имеет фиксированного уровня напряжения; если вы не используете его, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
–Ограничения тока:
Для достижения высокой скорости шага, питание двигателя, как правило, значительно выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А при 5 Ом сопротивления обмотки, откуда максимально допустимое питание двигателя равно 5 В. Использование такого двигателя с питанием 12 В позволит повысить скорость шага. Однако, чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Pololu A4988 поддерживает активное ограничение тока, которое можно установить подстройкой резистора на плате. Один из способов установить предельный ток – подключить драйвер в полношаговый режим и измерить ток, проходящий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничены примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменится предельный ток, так как напряжение на выводе “ref” является функцией Vdd.
Другой способ установить граничный ток – измерить напряжение на выводе “ref” и рассчитать полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированный сквозной отверстие (в группе на шелкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Ограничение тока = VREF × 2,5
Например: опорное напряжение равно 0,3 В, граничный ток 0,75 А. Как упоминалось выше, в режиме полного шага ток через катушки ограничен на 70% от текущего порога, поэтому чтобы получить полный шаг тока катушки в 1 А, текущий порог должен быть 1 А / 0,7 = 1,4 А, что соответствует VREF 1,4 А / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительной информации.
Следует обратить внимание, что ток обмотки двигателя может значительно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
–Рекомендации по рассеиванию мощности:
Максимально допустимый ток, который можно подать на обмотку, в микросхеме A4988 равен 2 А. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учетом отвода тепла от микросхемы, но при токе выше 1 А на обмотку необходимо тепловыдвод или другое дополнительное охлаждение.
Эта плата может нагреться так, что можно получить ожог, задолго до того, как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключенными к ней устройствами.
При использовании драйвера A4988 необходимо учитывать, что измеряемый ток на источнике питания, как правило, не соответствует величине тока на обмотке двигателя. Поскольку напряжение, которое подается на драйвер, может быть значительно выше напряжения на обмотке, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают как коммутируемое источниковое устройство с покроковым понижением питания). Кроме того, если напряжение питания намного выше необходимого уровня двигателя для достижения нужного тока, то шум будет очень низким, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).



Похожие товары

Нет в наличии
Нет в наличии
Нет в наличии


Нет в наличии
170.00 ₴


Нет в наличии
850.00 ₴ – 1,450.00 ₴
Sale